Mechanical Rubik's Cube Solver
Physical cube-solving robot built on a bare-metal embedded system.
Overview
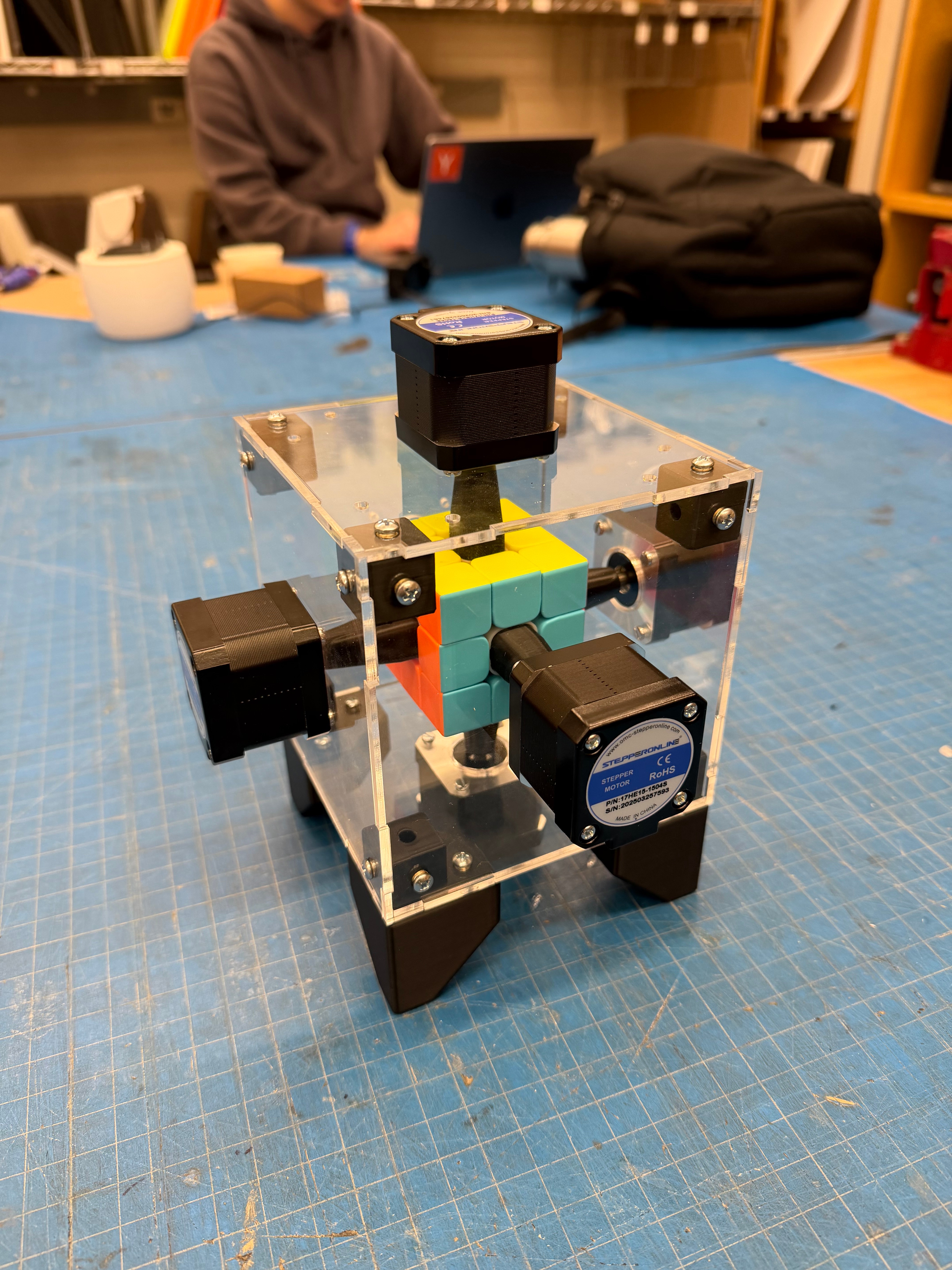
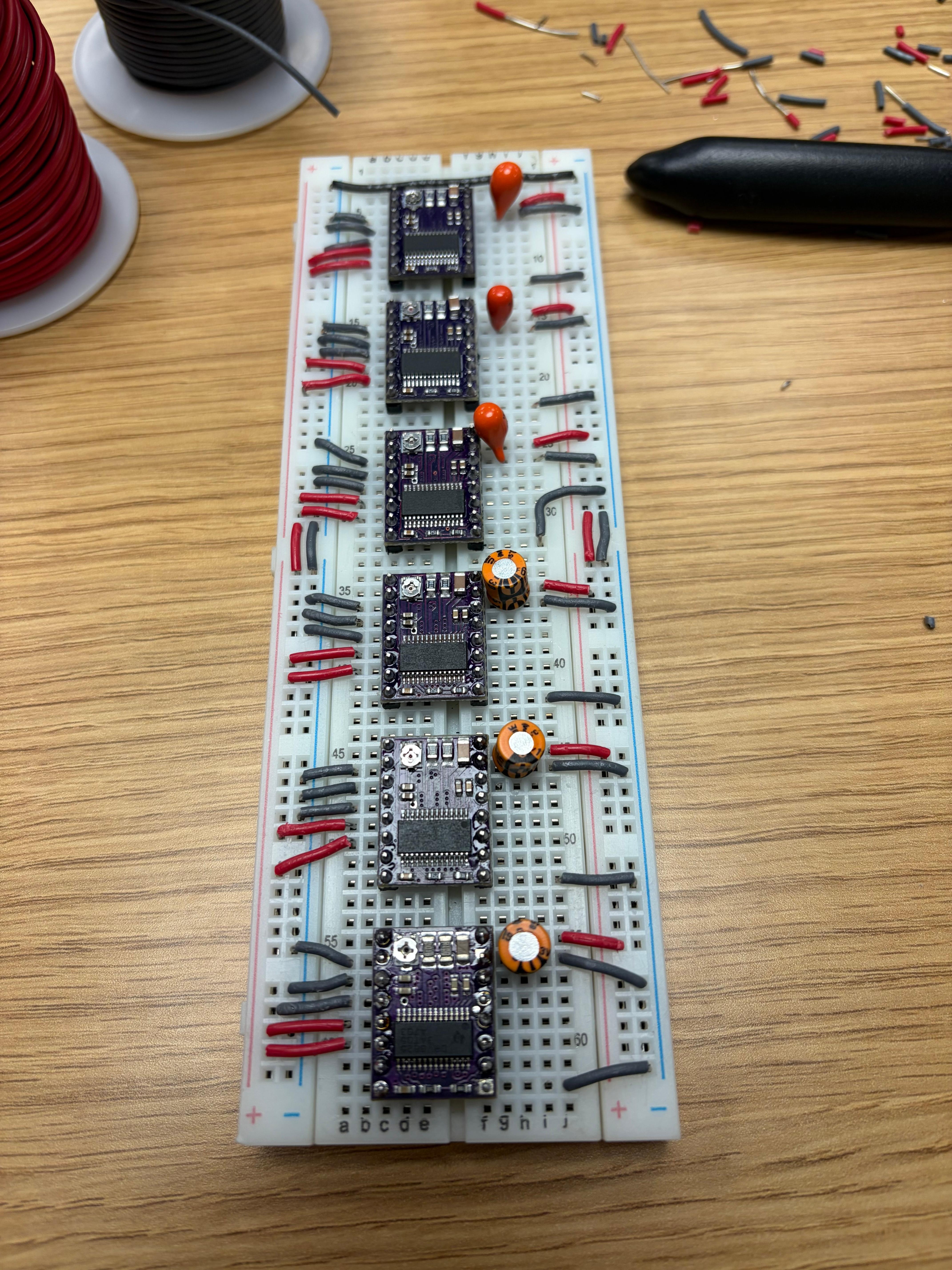
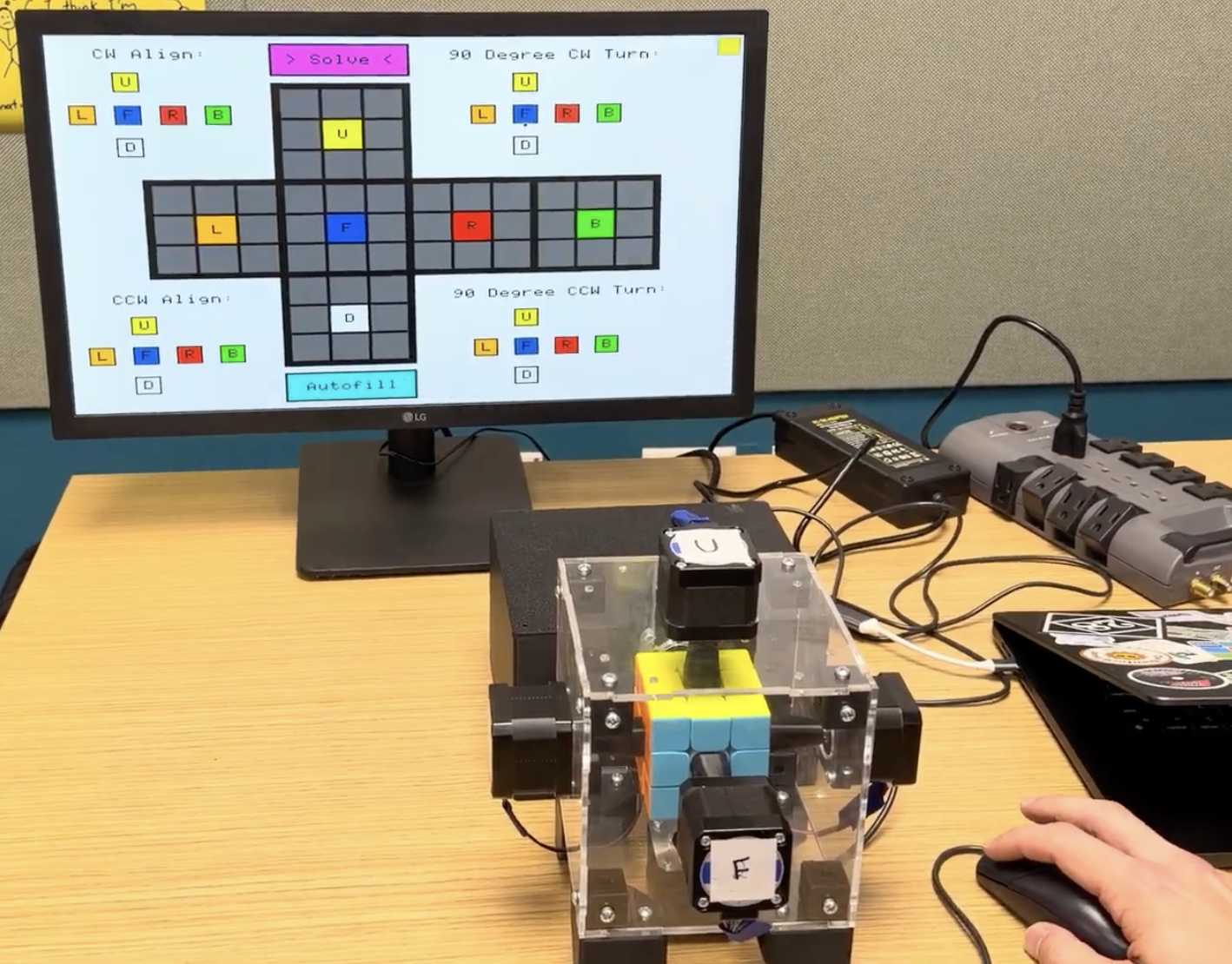
Built a physical Rubik's Cube solver with six stepper-motor-driven faces, motor-control circuitry, and a mouse-driven graphical UI layered on a bare-metal embedded system.
What I Built
- Six-motor physical cube solver with motorized face turns
- Motor execution logic for reliable face alignment
- C-based solving algorithm integration
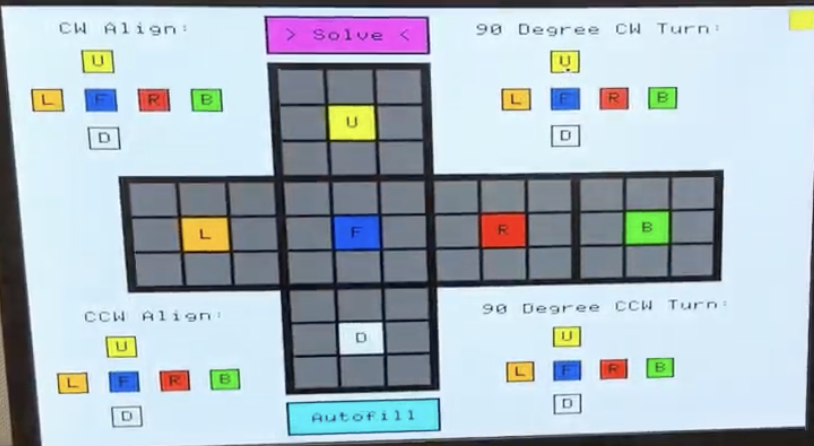
- Mouse-driven graphical UI for entering scrambles
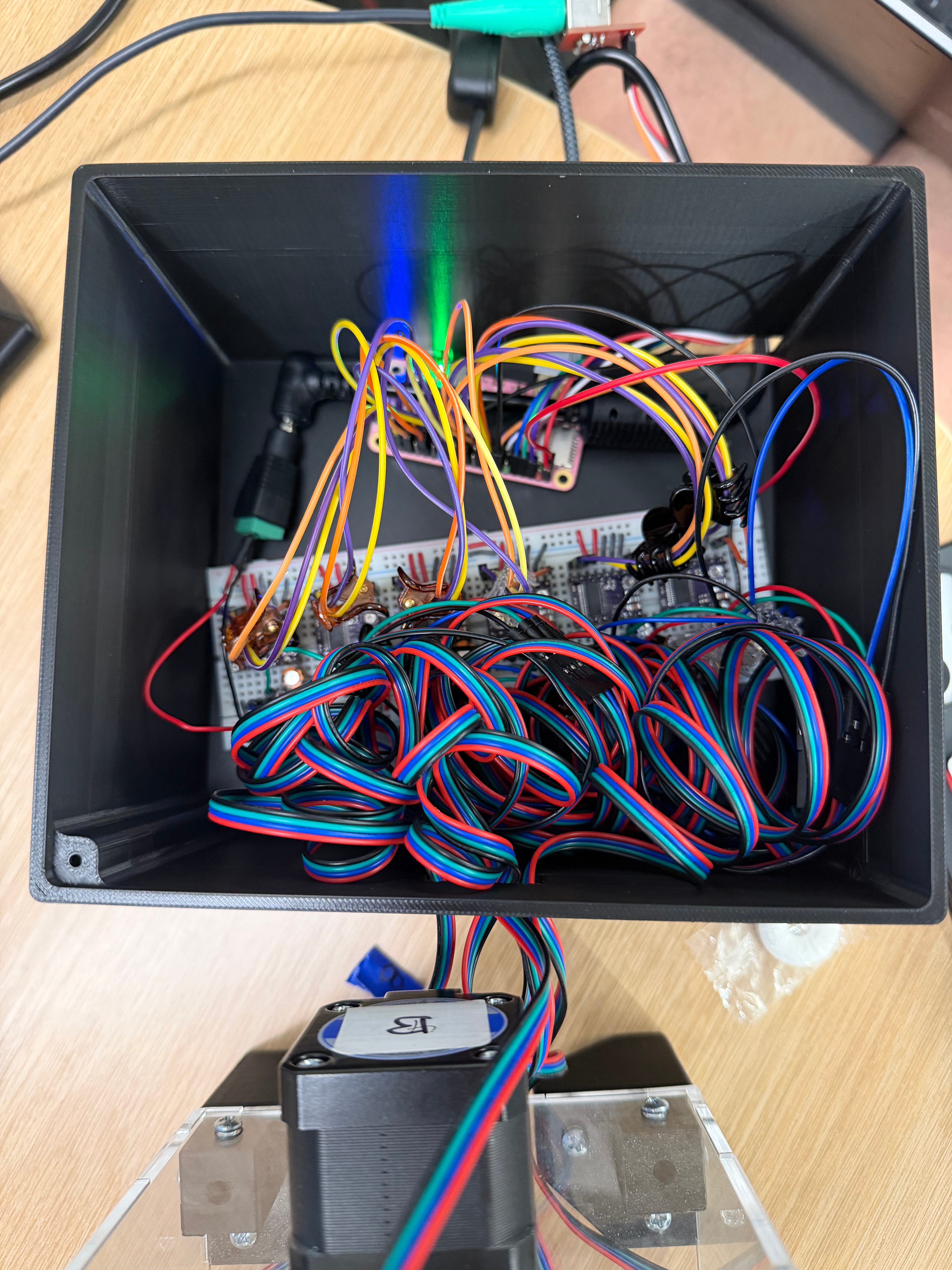
- Hardware/software stack layered on top of a custom embedded OS
Technical Details
The system used stepper motors and motor drivers to turn each face of a Rubik's Cube. The user entered arbitrary scrambles through a UI, after which the solving algorithm generated a move sequence and the motor-control code executed the turns mechanically. The project required integrating algorithmic logic, physical timing, motor sequencing, and hardware constraints.
My Role
Daniel focused on the embedded/electrical side, including motor-control circuitry, algorithm integration, UI integration, debugging, and reliable motor execution.
Challenges and Debugging
- Tuning motor timing for reliable turns
- Preventing face misalignment during fast execution
- Integrating the solving algorithm with physical motor commands
- Debugging motor driver behavior and hardware/software timing issues
Results
- Solved arbitrary UI-entered scrambles
- Mechanical solve time under 3 seconds from pressing solve to completion
- Reliable face-turn alignment at the demonstrated speed
Tools and Skills
Gallery